3 - PRINCIPE D'UNE COMMANDE FLOUE
3.1 Organisation d'une commande floue
Comme tout systême de commande, une commande positionne des variables de sortie en fonction de variables d'entrée.
Dans une commande floue, ceci se passe en 3 étapes :
Dans une commande floue, ceci se passe en 3 étapes :
- Interface avec le flou: caractérisation des variables d'entrée à l'aide de propositions floues
- Raisonnement flou: en fonction des propositions floues caractérisant les variables d'entrée, caractérisation des variables de sortie à l'aide de propositions floues
- Interface avec le non-flou: en fonction des propositions floues caractérisant les variables de sortie, affectation d'une valeur aux variables de sortie.
3.2 Interface avec le flou
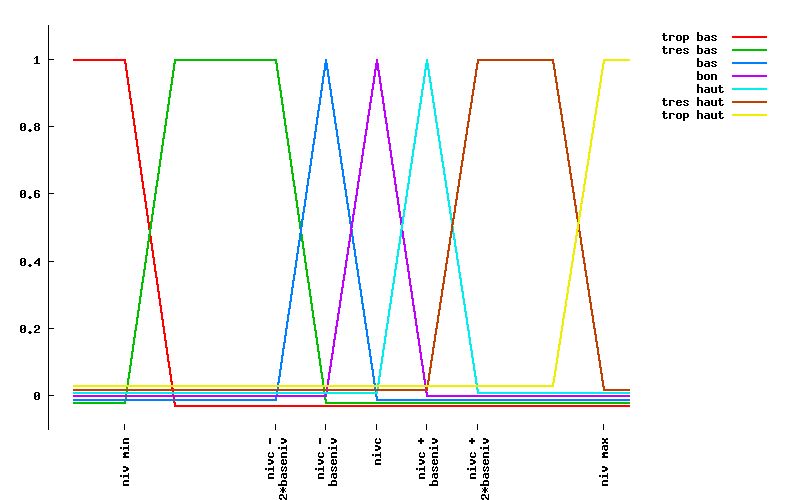
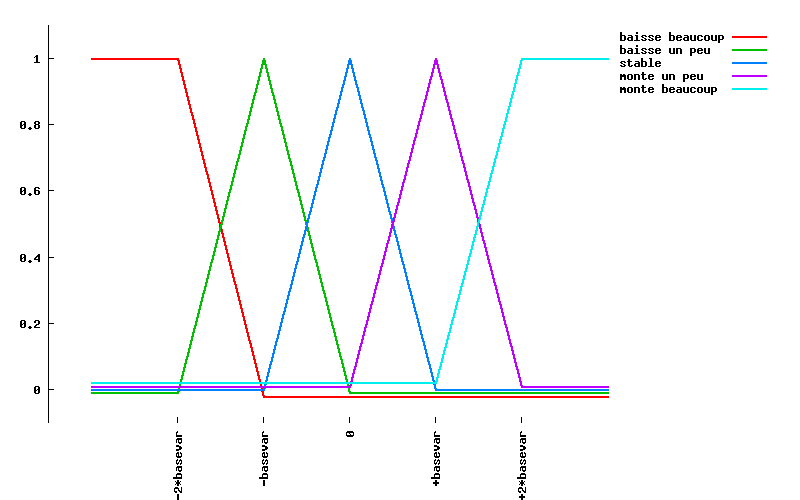
Chaque variable d'entrée numérique va être caractérisée à l'aide d'un certain nombre de propositions floues.
Si $x$ est une variable d'entrée numérique et $P_1, P_2 ...P_n$ n propositions floues caratérisant $x$,
on va définir $n$ fonctions $p_1, p_2..p_n$ :
$p_i : R rarr [0,1]$, $x rarr val(P_i)$
Les fonctions utilisées sont souvent de forme triangulaire ou trapézoïdale.
C'est en effet la démarche la plus naturelle :
Si $P_i$ est absolument vraie sur un intervalle, on obtient une fonction trapézoïdale.
Exemples:
1 - $x$ est une valeur régulée à la consigne $x0$
2 - $x$ est la température d'une piêce
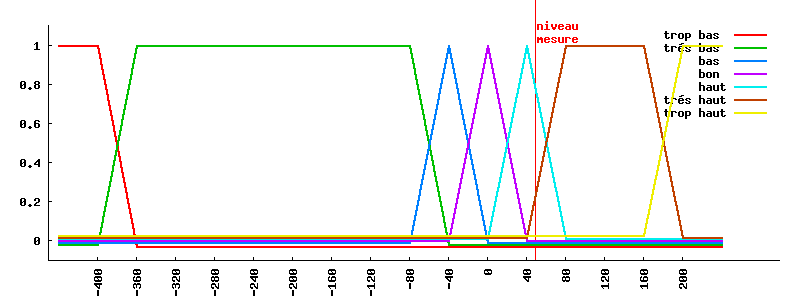
3 - Pour les propositions P caractérisant $x$ de manière extrême, l'intervalle sur lequel $p(x)$ est non nul sera souvent non borné.
En reprenant l'exemple précédent, si on représente la valeur de vérité de la proposition "il fait une chaleur insupportable", on obtiendra quelque chose du type
---------------------
Si $x$ est une variable d'entrée numérique et $P_1, P_2 ...P_n$ n propositions floues caratérisant $x$,
on va définir $n$ fonctions $p_1, p_2..p_n$ :
$p_i : R rarr [0,1]$, $x rarr val(P_i)$
Les fonctions utilisées sont souvent de forme triangulaire ou trapézoïdale.
C'est en effet la démarche la plus naturelle :
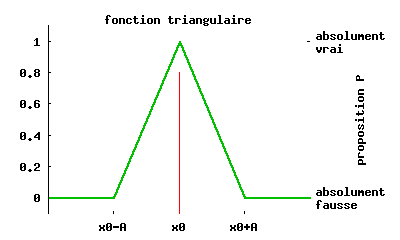
- on définit les valeurs de $x$ pour lesquelles $P_i$ est absolument vraie. Pour ces valeurs $p_i(x) = 1$
- on définit les valeurs de $x$ pour lesquelles $P_i$ est absolument fausse. Pour ces valeurs $p_i(x) = 0$
- on représente alors $p_i$ sous forme graphique, et on raccorde par des segments de droite.
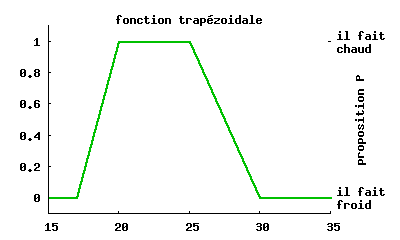
Si $P_i$ est absolument vraie sur un intervalle, on obtient une fonction trapézoïdale.
Exemples:
1 - $x$ est une valeur régulée à la consigne $x0$
- P est la proposition "x est bon"
- P est absolument vraie si $x = x0$
- P est absolument fausse si $x$ est différent de $x0$ de plus d'une valeur $a$
2 - $x$ est la température d'une piêce
- P la proposition "il fait bon" (On peut dire : il fait bon entre 20 et 25°C)
- au-dessous de 17°C, il fait froid (pas bon du tout)
- au-dessus de 30°C, il fait chaud (pas bon du tout)
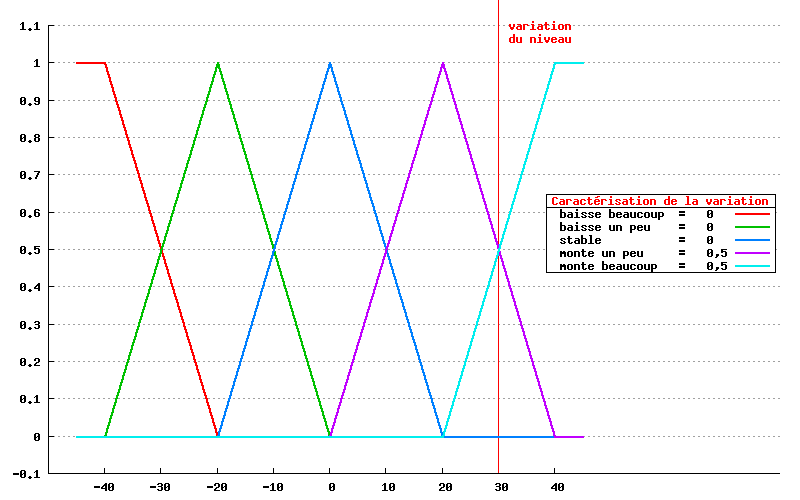
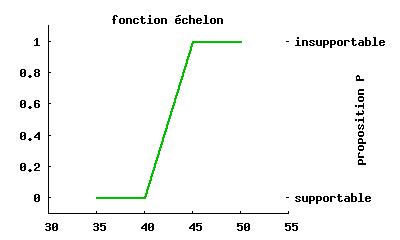
3 - Pour les propositions P caractérisant $x$ de manière extrême, l'intervalle sur lequel $p(x)$ est non nul sera souvent non borné.
En reprenant l'exemple précédent, si on représente la valeur de vérité de la proposition "il fait une chaleur insupportable", on obtiendra quelque chose du type
3.3 Raisonnement flou
Ayant caractérisé les variables d'entrées du systême, on cherche maintenant à caractériser les variables de sortie.
Pour celà, on utilise les rêgles qui décriront les variables de sortie en fonction des variables d'entrée.
Les rêgles sont du type :
Pour calculer la valeur de vérité de la combinaison de propositions floues relative aux variables d'entrée, il faut avoir défini les opérateurs logiques de base, c'est-à-dire choisi une "t-norme" (cf ch2).
De plus, les rêgles elles-mêmes peuvent être plus ou moins vraies. On peut donc leur affecter une valeur de vérité floue ($"comprise entre 0 et 1"$). Ceci permet d'établir une hiérarchie entre les différentes rêgles, qui n'ont pas toutes la même importance dans la commande.
Il existe plusieurs maniêres de calculer la valeur de vérité de la conclusion de la rêgle (relative aux variables de sortie), la plus simple étant de $"multiplier"$ la valeur de vérité de la prémisse de la rêgle (relative aux variables d'entrée) par la valeur de vérité de la rêgle.
On obtient ainsi, pour chaque rêgle, un $"résultat intermédiaire"$.
Comme la même proposition floue relative aux variables de sortie peut être la conclusion de plusieurs rêgles différentes, il faut ensuite "agréger les résultats intermédiaires" et pour celà définir un $"opérateur d'agrégation"$.
Si $p_i$ est la valeur de vérité de $P$ calculée avec la rêgle $R_i$ et $p$ la valeur de vérité de $P$, on peut prendre par exemple comme opérateur d'agrégation :
Remarque :
jjjj
On prend le ET probabiliste et avec les précautions qui ont été prises (cf remarques) on peut prendre la somme comme opérateur d'agrégation.
Pour celà, on utilise les rêgles qui décriront les variables de sortie en fonction des variables d'entrée.
Les rêgles sont du type :
SI "combinaison de propositions floues relatives aux variables d'entrée"
ALORS "proposition floue relative aux variables de sorties"
ALORS "proposition floue relative aux variables de sorties"
Pour calculer la valeur de vérité de la combinaison de propositions floues relative aux variables d'entrée, il faut avoir défini les opérateurs logiques de base, c'est-à-dire choisi une "t-norme" (cf ch2).
De plus, les rêgles elles-mêmes peuvent être plus ou moins vraies. On peut donc leur affecter une valeur de vérité floue ($"comprise entre 0 et 1"$). Ceci permet d'établir une hiérarchie entre les différentes rêgles, qui n'ont pas toutes la même importance dans la commande.
Il existe plusieurs maniêres de calculer la valeur de vérité de la conclusion de la rêgle (relative aux variables de sortie), la plus simple étant de $"multiplier"$ la valeur de vérité de la prémisse de la rêgle (relative aux variables d'entrée) par la valeur de vérité de la rêgle.
On obtient ainsi, pour chaque rêgle, un $"résultat intermédiaire"$.
Comme la même proposition floue relative aux variables de sortie peut être la conclusion de plusieurs rêgles différentes, il faut ensuite "agréger les résultats intermédiaires" et pour celà définir un $"opérateur d'agrégation"$.
Si $p_i$ est la valeur de vérité de $P$ calculée avec la rêgle $R_i$ et $p$ la valeur de vérité de $P$, on peut prendre par exemple comme opérateur d'agrégation :
$p = max(p_i)$
Si on a pris soin que $sum(p_i) <= 1$, on peut également prendre $p = sum(p_i)$Remarque :
Quand on a deux variables d'entrée x et y, on peut représenter les rêgles par un tableau avec les colonnes
correspondant aux propositions relative à x, en colonnes les propositions relatives à y, et dans les cases, les valeurs de vérité des propositions relatives aux variables de sortie.
Exemple :
Variables
Entrée : x et y, Sortie : z
Caractérisation de x
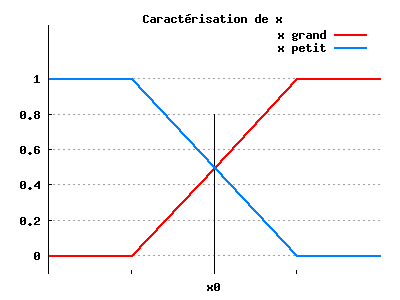
remarque : on a toujours $val("x petit") + val("x grand") = 1$
remarque : on a toujours $val("x petit") + val("x grand") = 1$
Caractérisation de y
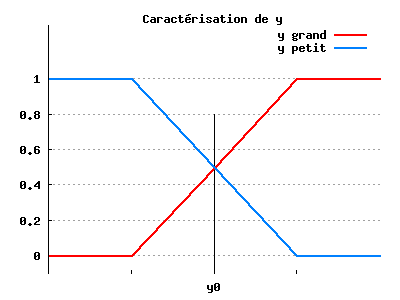
même remarque pour y
même remarque pour y
Rêgles :
- R1 - si x petit et y grand alors z petit )
- R2 - si x grand et y petit alors z grand ) valeur 1
- R3 - si x petit et y petit alors z petit )
- R4 - si x petit et y petit alors z grand ) valeur 0,5
- R5 - si x grand et y grand alors z petit )
- R6 - si x grand et y grand alors z grand )
Ces 2 derniêres rêgles traduisent le fait que si x est grand et y grand, alors z n'est ni spécialement grand, ni spécialement petit, et les 2 précédentes la même chose si x est petit et y petit.
Ces rêgles peuvent être représentées dans le tableau suivant :
| x y |
petit |
grand |
| petit |
z petit = 0,5 z grand = 0,5 |
z grand |
| grand |
z petit |
z petit = 0,5 z grand = 0,5 |
Remarques : dans chaque case val("z petit") + val("z grand") = 1
On prend le ET probabiliste et avec les précautions qui ont été prises (cf remarques) on peut prendre la somme comme opérateur d'agrégation.
- Si
"x petit" = 0,2 "x grand" = 0,8
"y petit" = 0,4 "y grand" = 0,6
- Alors :
R1 : "z petit"1 = 0,2 . 0,6 = 0,12
R2 : "z grand"2 = 0,8 . 0,4 = 0,32
R3 : "z petit"3 = 0,5 . 0,2 . 0,4 = 0,04
R4 : "z grand"4 = 0,5 . 0,2 . 0,4 = 0,04
R5 : "z petit"5 = 0,5 . 0,8 . 0,6 = 0,24
R6 : "z grand"6 = 0,5 . 0,8 . 0,6 = 0,24
"z petit" = 0,12 + 0,04 + 0,24 = 0,3
"z grand" = 0,32 + 0,04 + 0,24 = 0,7
R2 : "z grand"2 = 0,8 . 0,4 = 0,32
R3 : "z petit"3 = 0,5 . 0,2 . 0,4 = 0,04
R4 : "z grand"4 = 0,5 . 0,2 . 0,4 = 0,04
R5 : "z petit"5 = 0,5 . 0,8 . 0,6 = 0,24
R6 : "z grand"6 = 0,5 . 0,8 . 0,6 = 0,24
"z petit" = 0,12 + 0,04 + 0,24 = 0,3
"z grand" = 0,32 + 0,04 + 0,24 = 0,7
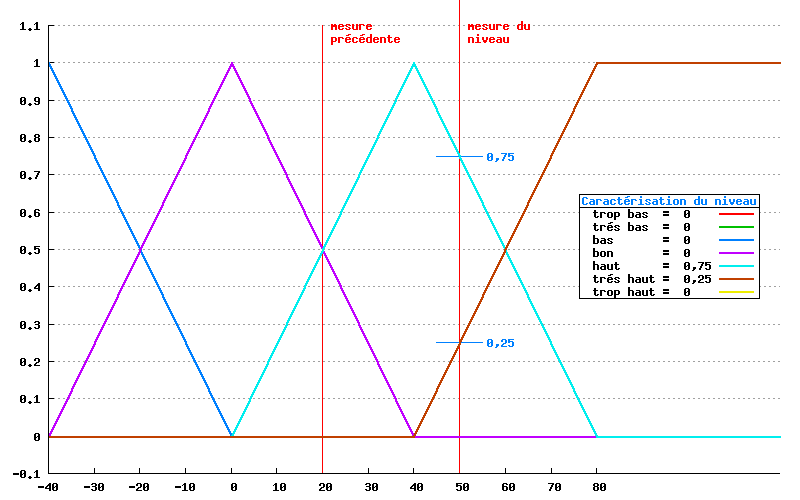
3.4 Interface avec le non-flou
Ayant trouvé une caractérisation floue des variables de sortie, il s'agit maintenant de leur affecter une valeur précise, non floue.
Pour celà, on peut procédé de plusieurs maniêres. Le choix de la méthode dépend du type de sortie que l'on veut obtenir.
Si la sortie ne peut prendre qu'un nombre fini de valeurs, on prendra celle dont la caratérisation se rapproche le plus des propositions floues calculées dans le raisonnement flou.
Si la sortie peut varier en continu, on utilisera une méthode barycentrique.
Exemple :
Pour celà, on peut procédé de plusieurs maniêres. Le choix de la méthode dépend du type de sortie que l'on veut obtenir.
Si la sortie ne peut prendre qu'un nombre fini de valeurs, on prendra celle dont la caratérisation se rapproche le plus des propositions floues calculées dans le raisonnement flou.
Si la sortie peut varier en continu, on utilisera une méthode barycentrique.
Exemple :
Reprenant l'exemple précédent,
Si z ne peut prendre que les valeurs 0 ("z petit" absolument vrai et "z grand" absolument faux) et 10 ("z grand" absolument vrai et "z petit" absolument faux), on prendra z = 10.
Si z peut varier en continu entre 0 et 10, on prendra : (0,3 x 0 + 0,7 x 10) / (0,3 + 0,7) = 7
Si z ne peut prendre que les valeurs 0 ("z petit" absolument vrai et "z grand" absolument faux) et 10 ("z grand" absolument vrai et "z petit" absolument faux), on prendra z = 10.
Si z peut varier en continu entre 0 et 10, on prendra : (0,3 x 0 + 0,7 x 10) / (0,3 + 0,7) = 7